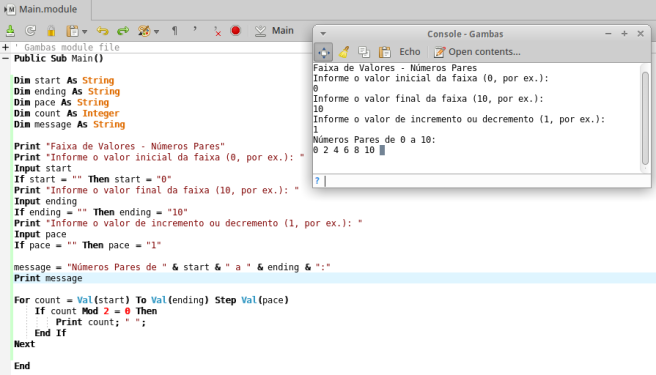
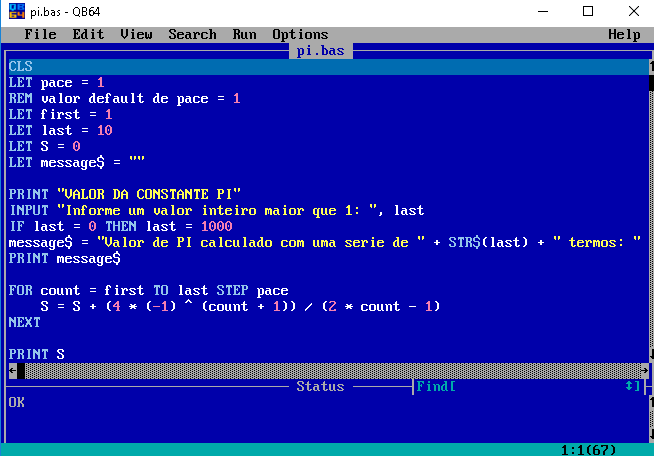
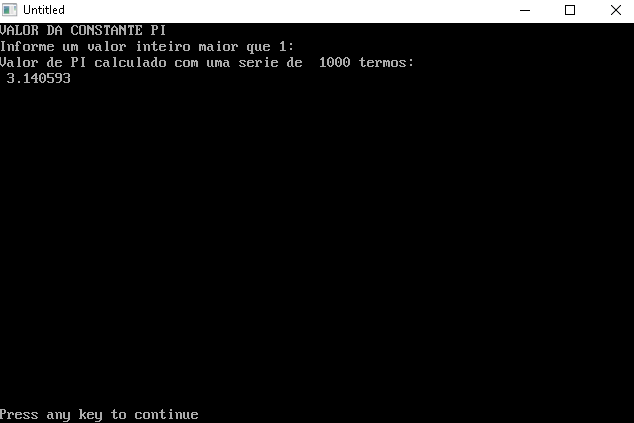
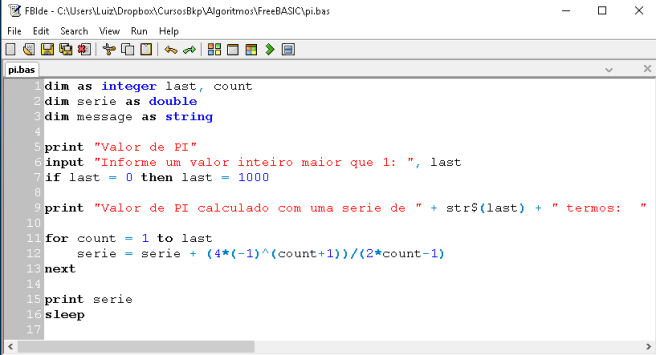
Dessa vez vamos codificar um aplicativo para calcular PI, uma série matemática convergente e a estrutura de controle de repetição com laço for, em 3 dialetos do BASIC.
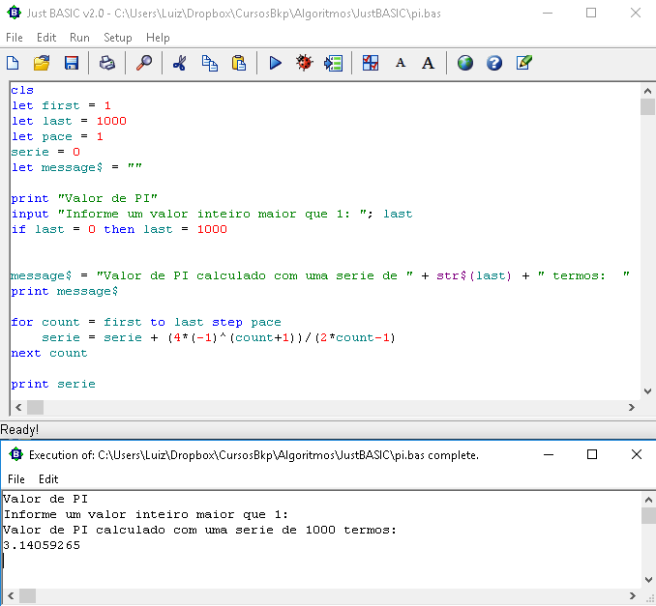
A declaração de variáveis é igual no QB64 e no JustBASIC. Ambos dialetos pedem que as variáveis string tenham o sufixo $. A rigor, a variável message$ não é necessária.
O uso de LET para declarar as variáveis é facultativo e, a rigor, algumas variáveis, como message$ e last, não precisam ser declaradas porque são inicializadas em seguida, assim como count. No entanto, convém declarar e inicializar as variáveis S (identificada como serie nos outros 2 dialetos) e principalmente first, para que erros de cálculo não ocorram.
A cláusula step do loop for é opcional e quando omitida não é necessário declarar e inicializar a variável pace (que, aliás, pode ter qualquer nome válido), já que o passo terá automaticamente o valor de 1.
Nesta série matemática, o valor de count vai de 1 até infinito ou até o número informado pelo usuário, representado pela variável last. Por isso, a variável first deve ser iniciada com o valor de 1, ou simplesmente substituída por essa constante literal (1).
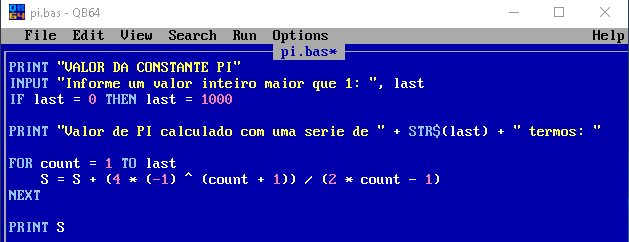
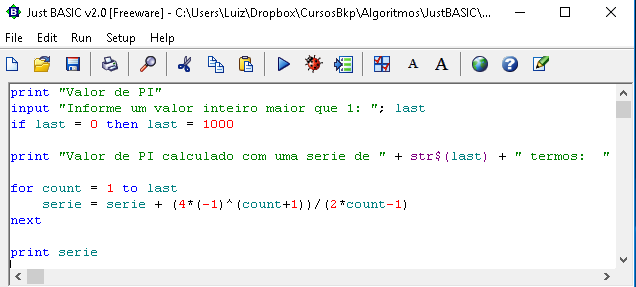
O códigos em QB64 e JustBASIC podem, então, serem simplificados assim:
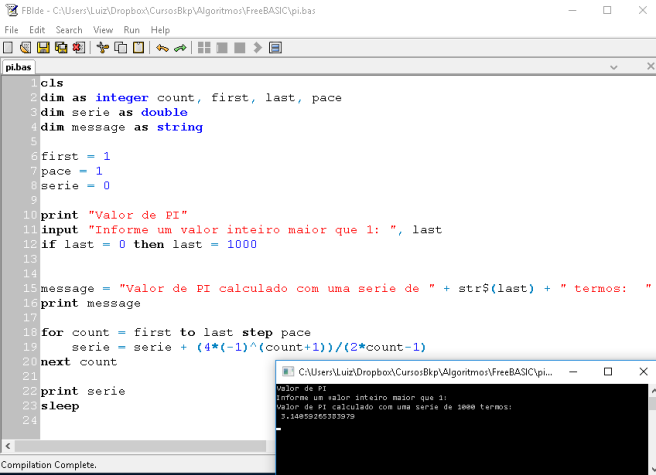
Os 3 dialetos dispensam o uso da variável contadora após a cláusula next do loop for. Em FreeBASIC as variáveis não precisam ser inicializadas, mas devem ser declaradas (com o comando DIM…AS). Uma simplificação do código seria a seguinte:
Dúvidas?

 9
9